At the Massachusetts Institute of Technology, researchers led by Pulkit Agrawal have engineered a robotic system capable of handling and peeling various fruits and vegetables, showcasing a level of dexterity akin to human capabilities. This development marks a significant step in robotic technology, particularly in the manipulation of delicate objects within manufacturing processes.
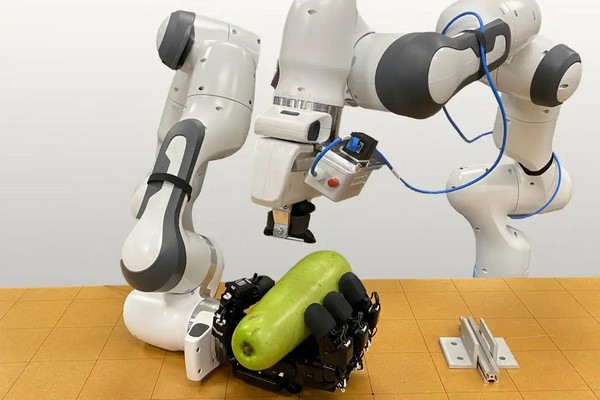
The robot employs a dual-arm mechanism; one for rotating the produce with tactile feedback, and the other equipped for peeling operations. Initially trained in a simulated setting to refine its rotation technique, the robot's real-world efficacy was later validated through tasks involving pumpkins, radishes, and papayas. Despite challenges with smaller, irregularly shaped items like ginger, the team is optimistic about the system's potential for enhancement.
Jonathan Aitken from the University of Sheffield acknowledges the robot's adeptness in grasping and reorienting tasks, highlighting its potential utility in industrial applications requiring precise object orientation.
However, Aitken notes the improbability of its deployment for vegetable peeling in industrial settings, given the existence of specialized machinery for such purposes. The innovation represents a leap in robotic manipulation, aiming to bridge the gap between robotic and human dexterity in handling delicate materials.
Source: newscientist.com